
Vid absolut positionering bestämmer mottagaren sin position direkt mot GNSS-satelliterna, och endast en GNSS-mottagare används. Vid relativ positionering bestämmer mottagaren sin position relativt en eller flera andra mottagare med känd position.
Absolut positionering med en GNSS-mottagare
Absolut positionering innebär att mottagaren bestämmer positionen direkt i förhållande till GNSS-satelliterna. Mätningen sker alltså med endast en mottagare, vilket är standardmetoden för mätning med enklare GNSS-mottagare och i bilnavigeringssystem.
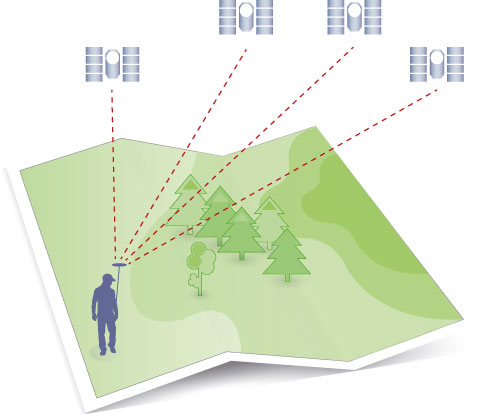
Mätosäkerheten vid absolutpositionering kan bli ganska hög, eftersom den i normalfallet inte innefattar någon metod att reducera effekten av de felkällor som påverkar GNSS-signalerna. Därför använder man sällan absolutpositionering vid geodetisk mätning med GNSS. För att reducera effekten av felkällor vid absolut positionering kan man tillföra extern information om dem, vilket utnyttjas vid mätning med Precise point positioning (PPP).
Relativ positionering med flera GNSS-mottagare
Vid relativ positionering bestämmer mottagaren sin position relativt en eller flera andra mottagare som mäter på punkter med känd position. Detta kräver flera mottagare som samtidigt mäter mot samma GNSS-satelliter.
Genom att bilda differenser mellan de inbördes observationerna kan man reducera eller eliminera flera felkällor. En tumregel är att detta fungerar bättre ju närmare mottagarna befinner sig varandra, eftersom de GNSS-signaler som når respektive mottagare då påverkas på likartat sätt av atmosfären.
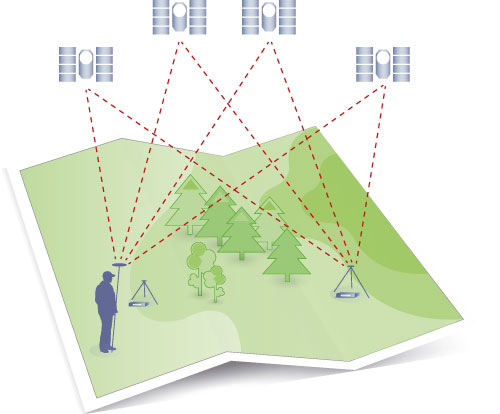
En GNSS-mottagare som är uppsatt över känd punkt kallas referensstation, medan den mottagare vars position du försöker bestämma med hjälp av en eller flera referensstationer kallas rover. Referensstationerna kan vara tillfälliga eller permanenta. Det har blivit allt vanligare att många permanenta referensstationer tillsammans bildar markbaserade stödsystem för relativ GNSS-positionering, till exempel för nätverks-RTK.
För tillämpningar med krav på en mätosäkerhet på centimeternivå sker GNSS-mätning nästan uteslutande med relativ positionering, antingen i realtid eller med efterberäkning av positionen. Om realtidsmätning ska vara möjlig kräver det tillgång till någon form av kommunikationskanal för att skicka data mellan referens- och rovermottagare, till exempel radio eller mobilt Internet.
Exempel på tillämpade mätmetoder som bygger på relativ positionering: