

Contents of this page may be automatically translated, we take no responsibility for the accuracy of the translation. Feel free to contact our customer support centre if you have any questions.
Open data includes DGNSS which can be used when the quality requirements are not the highest. The service requires internet connection, and you get your position in real time. DGNSS is part of Lantmäteriet's open data and is available for positioning across the country.
Use our services
Real-time service with positional uncertainty at the metre level
DGNSS can be used freely by anyone who has registered an account and has a GNSS device that can receive standardised correction data in RTCM format for GNSS over the Internet.
The position uncertainty of the position in the SWEREF 99 reference system is at the metre level, but depends on the measurement environment and the performance of the GNSS device.
Read more about Lantmäteriet's open data.
Please note that DGNSS has replaced Network DGNSS as a standalone service. Network DGNSS continues to be included as a data content in Network RTK.
Requirements and recommendations for the service
The basic requirements for your GNSS device are:
- The device should be able to handle incoming GNSS correction data in the standard format RTCM 2.3
- The device should act as an Ntrip client, or be connected to another device acting as an Ntrip client (eg a mobile phone).
Connection to the service
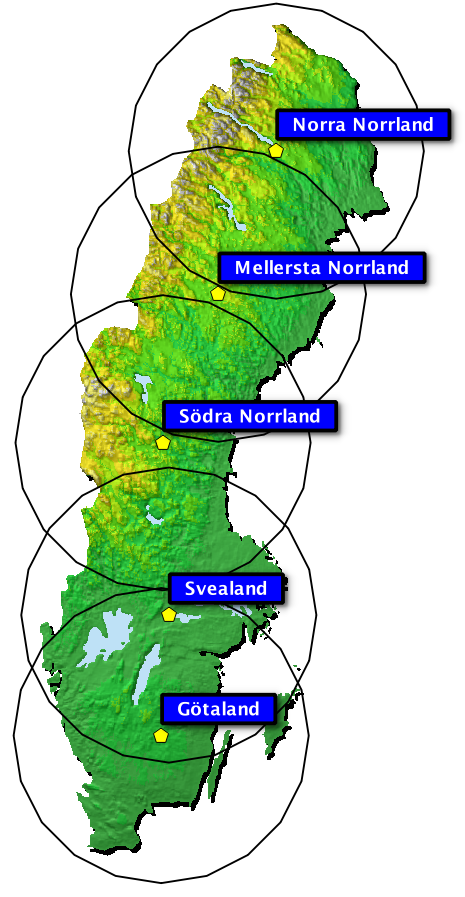
Connection is made via modem or mobile phone that is connected to (or integrated with) the GNSS receiver, a so-called Ntrip client. You choose one of five connection points, depending on which of the points you are closest to. For the best results, the distance to the nearest access point should not exceed 300 kilometers. Name of the access points in parentheses below:
- Norra Norrland (norrland_n)
- Mellersta Norrland (norrland_m)
- Södra Norrland (norrland_s)
- Svealand (svealand)
- Götaland (gotaland)
The choice of mountpoint can be automated in some Ntrip clients, e.g. by using the autonomous position of the GNSS unit.
Forgot your password? (new window)
Expected position quality
With the help of correction data, your GNSS unit should be able to determine the position with a so-called differential code solution (which corresponds to the code "2" for GPS Quality Indicator in a GGA string according to NMEA 0183 standard (new window).
For a differential code solution, the expected position uncertainty in the SWEREF 99 reference system is about 1 meter, but may vary slightly depending on the performance of the GNSS device and the distance to the connection point. The measure of positional uncertainty is expected to cover approximately 95% of all position determinations.
Definitions - GNSS
|
Concept
|
Explanation
|
|---|---|
|
DGNSS
|
Differential GNSS is a collective term for measurement that uses multiple GNSS receivers to reduce position uncertainty. Today, DGNSS is mainly used to describe the relative measurement methods based on code measurement, which is based on a simpler and more robust principle compared to carrier phase measurement.
|
|
GNSS
|
Global Navigation Satellite Systems are the global satellite systems used for navigation and positioning, which include the U.S. GPS, the Russian Glonass, the European Galileo system, the Chinese BeiDou, the Japanese QZSS system etc.
|
|
Ntrip
|
Networked Transport of RTCM via Internet Protocol is a standard protocol for transmitting GNSS data over the Internet. The latest version is 2.0.
Example of Open Source Development:
|
|
RTCM
|
Radio Technical Commission for Maritime Services is an international co-operation organization that establishes standards for radio communication. RTCM Special Committee (new window) provides the most common manufacturer-independent standards for so-called correction data used in real-time GNSS applications, for example is used in this DGNSS service RTCM version 2.3 (new window).
|
|
Swepos
|
Swepos is a so-called active reference network, a network consisting of hundreds of permanent reference stations for GNSS with fixed data connections to Lantmäteriet's
|
|
SWEREF 99
|
A national three-dimensional reference system used for mapping and position indications in Sweden. Positions in 3D are primarily given as Cartesian (X, Y, Z) in a right-hand oriented geocentric coordinate system, or in a geodetic coordinate system (latitude, longitude, height) on the reference ellipsoid GRS 80. If the position is to be expressed as horizontal coordinates (2D) then projection parameters must be specified.
|