Geotorget produktstöd
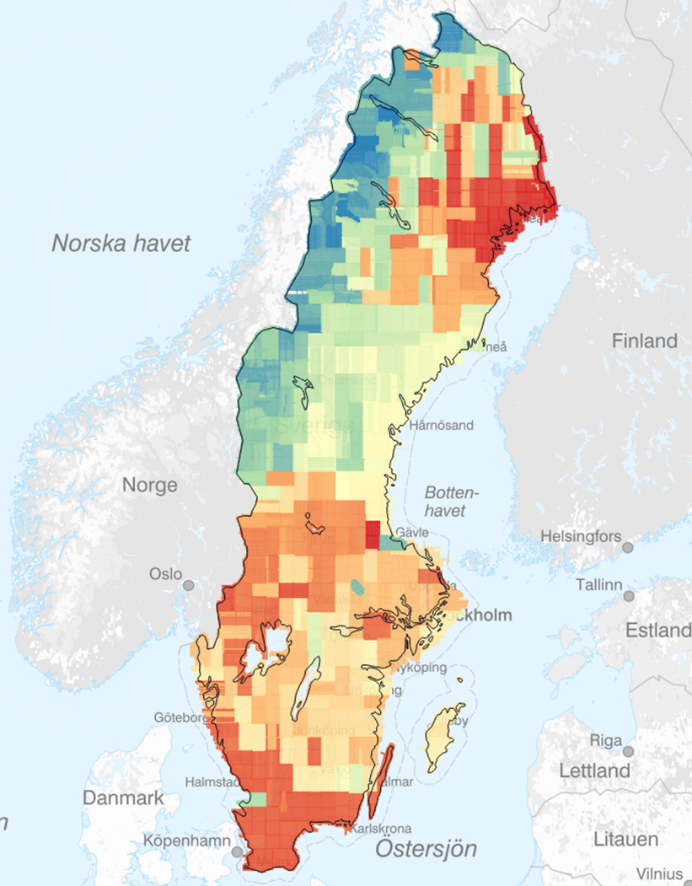
Geotorget produktstödLaserskanning för uppbyggnad av den Nationella höjdmodellen NH pågick mellan 2009 och 2019. Sedan 2018 pågår skoglig laserskanning som täcker hela landet utom fjällkedjan, med en omdrevstid på cirka sju år. Detta är nu den främsta källan för uppdatering av NH. Men utanför täckningsområdet, samt vid större markförändringar mellan omdreven, krävs andra källor.
Den enda rikstäckande källan för uppdatering av NH är bildförsörjningsprogrammet, som har betydligt kortare omdrevstid och vars bilder kan matchas till en ytmodell med hög kvalitet.
Nyttan med en uppdaterad terrängmodell måste dock vägas mot att uppdatering med bilddata ger en lägre kvalitet än laserskanning. Därför bör endast större förändringar uppdateras med denna teknik, och bara inom områden där skoglig laserskanning inte är nära förestående.
Den landstäckande ytmodell som genereras från bildförsörjningsprogrammets data är från och med 2019 ett raster med 0.25 eller 0.5 meters upplösning, vilket motsvarar ungefär halva den ursprungliga bildens upplösning.
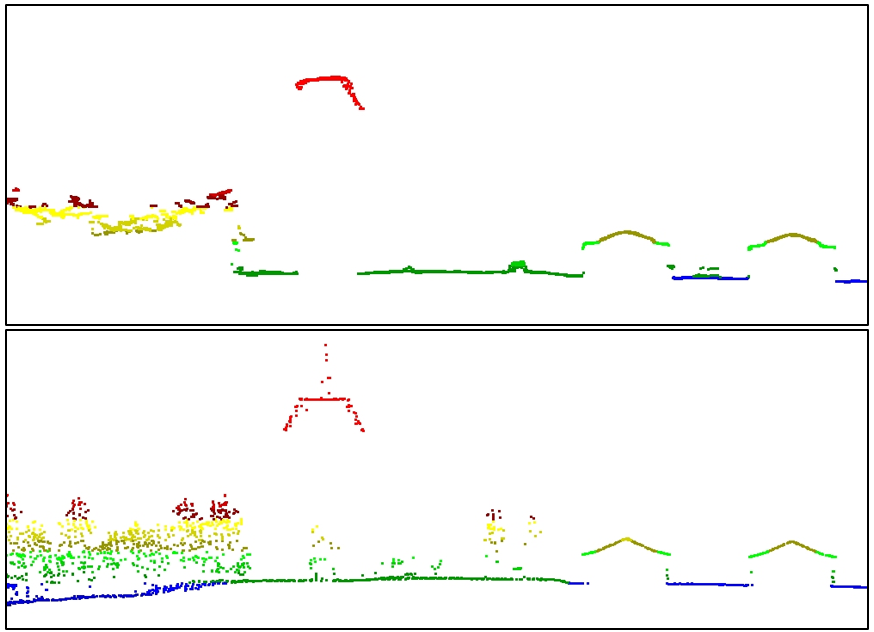
Automatisk bildmatchning används för att först generera ett punktmoln med full upplösning. Påföljande filtrering och nedsampling minskar brus, samt motsättningar och grova fel. Det resulterande rastret lagras som punkter i komprimerat LAS-format, där varje punkt även har färgattribut.

Det finns många likheter mellan laserdata och bilddata, men också viktiga skillnader. Den viktigaste skillnaden i detta sammanhang är att endast laserskanning förmår avbilda markytan under vegetationen.
Det gör det relativt enkelt att markklassa laserdata och filtrera bort vegetation och byggnader. För klassning och filtrering av bilddata måste delvis andra metoder användas.
Radiometrisk och geometrisk information
I bilddata finns förstås radiometrisk information i form av intensitet inom olika spektrala band, men även geometrisk information i form av kameraparametrar samt position och orientering för varje bild. Tidigare har man främst baserat analyser på radiometrisk information, men med nya algoritmer och kraftfulla datorer har även den geometriska informationen blivit lätt tillgänglig för analys.
Den radiometriska informationen är starkt påverkad av vilken kamera som används, samt vid vilken årstid och tid på dygnet som fotograferingen görs. Genom att arbeta med differenser eller kvoter mellan spektrala band kan man till viss del normalisera den radiometriska informationen, och exempelvis NDVI kan ofta ge en god uppfattning om vegetationens utbredning. Men det är ändå svårt att jämföra bilder från olika kameror och tidpunkter.
Den geometriska informationen är många gånger lättare att jämföra eftersom den i mindre omfattning påverkas av kamera och tidpunkt. Ytmodeller från två fototillfällen kan enkelt subtraheras och visar då direkt vilka höjdförändringar som har skett. Problemet blir i stället att fokusera på de förändringar som är relevanta för den nationella höjdmodellen, och bortse från exempelvis skogens tillväxt.
Beräkning av textur
Metoden för detekteringen av förändringar bygger på analys av ytmodellens textur och färginformation (vegetationsindexet NDVI). Med hjälp av den informationen skapas en mask som används för att exkludera förändringar som sannolikt inte representerar mark.
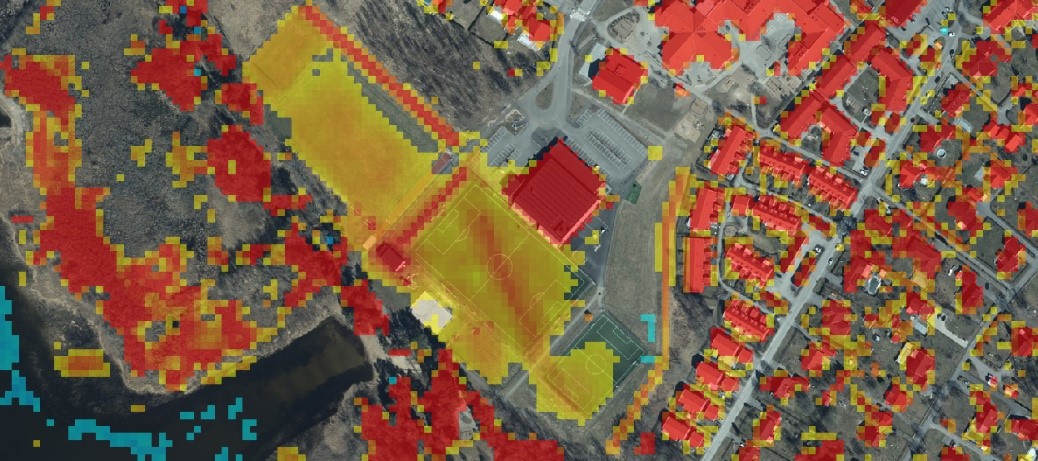
Ytmodellens textur kan beräknas på olika sätt. I detta fall delas modellen in i celler, och för varje cell beräknas ekvationen för det plan som bäst matchar den oregelbundna ytan. Minsta-kvadratmetoden används för beräkningen, och standardavvikelsen för residualerna blir då ett mått på ytans textur. Vid förändringsdetektering för NH används 5 meters upplösning, vilket ger tillräcklig detaljeringsgrad och lätt hanterbara datamängder. Det ger också hög signifikans för den beräknade texturen, eftersom standardavvikelsen normalt kommer att baseras på minst 100 residualer per cell.
Resultatet blir ett raster där varje cell har ett värde som motsvarar den underliggande ytmodellens textur. I en visualisering ser man direkt sambandet mellan hög textur och vegetation. Men man ser också att byggnader får hög textur längs fasaderna. Det beror på att inpassningen av planet ger stora residualer när samma cell innehåller höjdvärden både på marken och på taket.
Filtrering och användning av färgindex
Tyvärr kan man inte direkt identifiera vegetation ur den faktiska texturbilden. Det finns nämligen många typer av vegetation som har en relativt slät överyta, och som därmed har låg faktisk textur. Det gäller framförallt vissa plantager och buskage, men även enstaka trädkronor. Även hustak har naturligtvis låg textur. Texturbilden måste därför bearbetas så att åtminstone majoriteten av dessa celler kan associeras med vegetation eller byggnader.
I detta fall används ett filter som för varje cell justerar den faktiska texturen baserat på relationen till angränsande celler. Ett fönster med storlek 3 × 3 celler får röra sig över texturbilden, och för varje position beräknas skillnaden i höjd och färgindex mellan centrumcellen och varje angränsande cell. Som färgindex används normalt NDVI.
För varje fönster tillämpas sedan en viktfunktion som tilldelar centrumcellen en högre textur om det är sannolikt att den representerar vegetation eller byggnad. Generellt gäller att centrumcellens textur ofta höjs om den har mycket högre höjd, eller har ungefär samma höjd eller färgindex, som en eller flera angränsande celler med hög textur. Resultatet blir att små ytor på slät vegetation eller hustak får höjd textur, samtidigt som öppna ytor behåller en låg textur.
För att ytterligare stärka identifieringen av vegetation görs en sammanvägning av ytmodellens textur och färgindex. Om NDVI är över 0.2 skaleras det om till en linjärt ökande viktfunktion och multipliceras med texturen. Detta medför att många områden med relativt slät vegetation får en höjd textur.
Urval och vektorisering
Den filtrerade, och med färgindex sammanvägda texturbilden, kan sedan enkelt omvandlas till en textur-/vegetationsmask genom delning vid ett tröskelvärde. Vid 5 m upplösning är ett lämpligt tröskelvärde cirka 0.2 m. Under tröskeln finns då öppen mark och över tröskeln finns främst vegetation och byggnader.
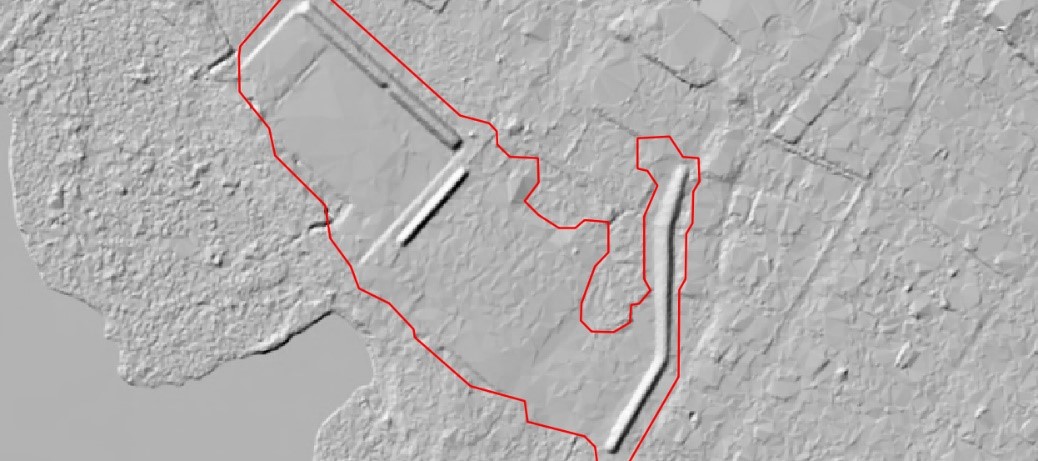
Genom en enkel överlagring mellan den gamla terrängmodellen (NH), den nya ytmodellen, och den bearbetade texturbilden, kan områden med förändrad mark identifieras. I detta fall anses celler som har en höjdskillnad på mer än 1 m och en textur under 0.2 m utgöra signifikanta markförändringar. För att ytterligare begränsa urvalet används befintliga kartdata från Lantmäteriets databas med grundläggande geografiska data (GGD). Celler som ligger inom befintliga polygoner för byggnader och vatten ignoreras helt.
Därefter aggregeras närliggande celler och vektoriseras till polygoner. Om arealen är minst 5000 m² går de vidare till nästa steg.
Manuell bedömning
Resultatet från förändringsdetekteringen är alltså polygoner som indikerar sannolika större markförändringar. En stor del av dessa är dock falska träffar på slät vegetation, som trots filtrering och sammanvägning med NDVI har bibehållen låg textur. Exempel på två vanliga felträffar är åkrar med högt växande grödor som raps, samt täta bestånd av vass. Det behövs därför en manuell bedömning för att avgöra om en indikerad förändring är sann eller falsk.
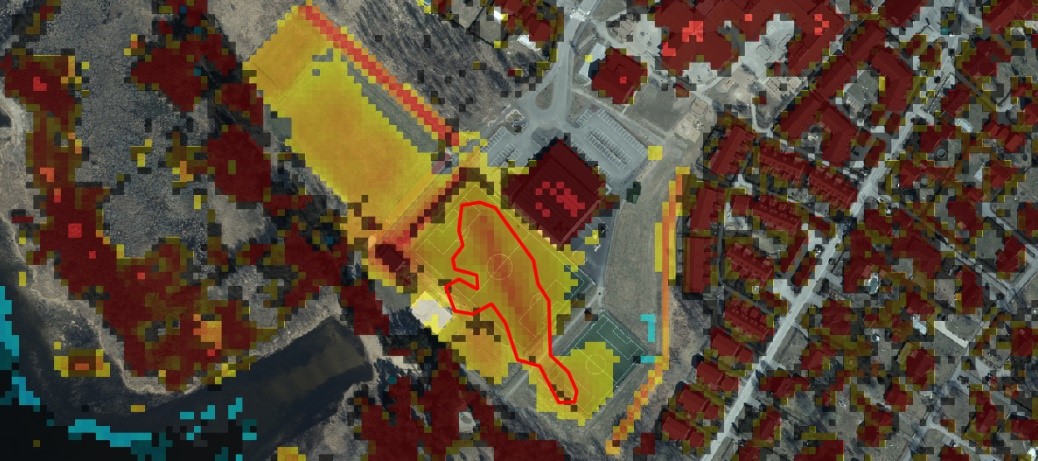
Som stöd för tolkningen används nytt ortofoto framställt från samma bilddata som ytmodellen, i kombination med äldre ortofoto från ungefär den tidpunkt då ursprunglig laserskanning för NH utfördes. Dessutom en differensbild, som i lämplig färgskala visar skillnaden i höjd mellan ytmodellen och NH. Det är viktigt att operatören tänker på att den faktiska markförändringen ofta är större än den automatiskt avgränsade, eftersom endast den del av förändringen som orsakat en stor höjdskillnad är indikerad.


Alla faktiska markförändringar bedöms sedan utifrån bestämda kriterier med avseende på närhet till bebyggelse, infrastruktur och vatten i kombination med förändringens areal. Alla förändringar bedöms lika, oavsett om de är pågående (exempelvis vägbyggen) eller slutförda. Områden som ständigt förändras (exempelvis täkter) ignoreras normalt, om inte den yttre begränsningen har förändrats (utökats).
De markförändringar som uppfyller kriterierna går sedan vidare i processen, som slutar med att höjdinformation från bilddata inom utvalda områden ersätter äldre höjdinformation i NH. Den äldre informationen bygger ofta på laserskanning med låg geometrisk osäkerhet, men den är inaktuell och därmed inte värd att bevara.